Our Story
Our laboratory was started in August 1998 in the Precision and Intelligence Laboratory.
We moved to the Life Engineering Organization and became a laboratory of the Biointerface Research Unit of the Innovation Research Institute in 2016.
About Our Laboratory
Since the early days, we have continued to develop musculoskeletal models and have been able to estimate muscle tension, joint torque, joint stiffness, and angle from electromyography. Using this model, it became possible to convert the signals transmitted from the brain to the muscles into body movements.
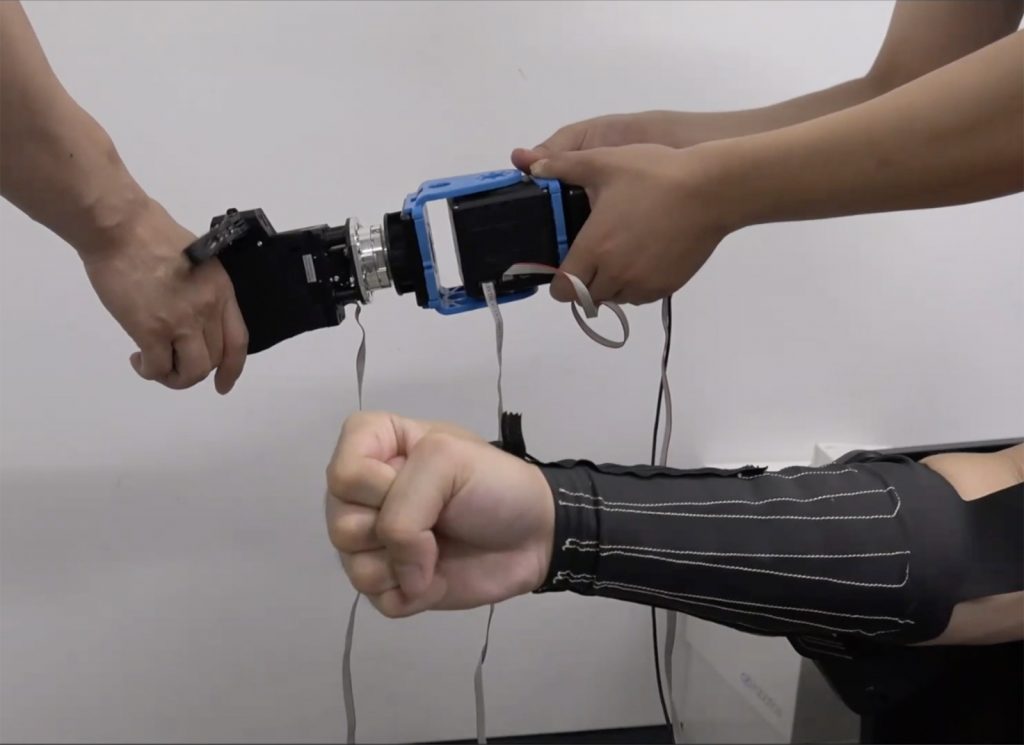
Using the musculoskeletal model, it is now possible to measure muscle activity as electromyogram and control robots such as artificial arms based on the signals. Also, using machine learning such as reinforcement learning, it is now possible to create a computational motor learning and control model that calculates arm movements.

Yasuharu Koike
Professor
Victor Barradas
Assistant Professor

Saetia Supat
Assistant Professor